Коротко о файле:Курсовая работр. Два чертежа, пояснительная записка
Існує багато видів земляних робіт, на яких використання традиційних машин – екскаваторів, бульдозерів і скреперів – недоцільне. До них належить розробка міцних, мерзлих та обводнилих ґрунтів, виконання траншей та щілин, прокладання ліній комунікацій, тощо. Хоч об’єми їх відносно невеликі, вартість їх чимала. Наприклад, прокладання 1км ліній зв’язку в гірських умовах і міцних ґрунтах в 15...18 разів дорожче ніж у звичайних умовах – на рівнинах і в слабких ґрунтах.
Для виконання великих об’ємів земляних робіт створюються нові машини із збільшеною потужністю, раціональні системи машин, машини для виконання робіт на мерзлоті, в гірських умовах та удосконалюються існуючі машини. Ведеться пошук не тільки нових видів машин, але і нових методів розробки ґрунтів. Отримують розповсюдження землерийні машини спеціального призначення, які основані на використанні вибухових, гідравлічних, хімічних засобів руйнування ґрунтів і порід.
Таким чином, машини для спеціальних будівельних робіт складають галузь техніки, яка розвивається динамічно, де з’являється багато нових конструкцій машин та засобів розробки ґрунту. Тому тема індивідуальної роботи є актуальною, дозволяє познайомитись із цими цікавими машинами та методами розрахунку їх параметрів.
Роторні робочі органи мають наступні переваги над іншими робочими органами: низька металоємність бо відсутній великий коефіціент використання робочого органу; великий крутний момент при малих частотах обертання; збільшена швидкість різання, що призводить до динамічних умов руйнування грунту.
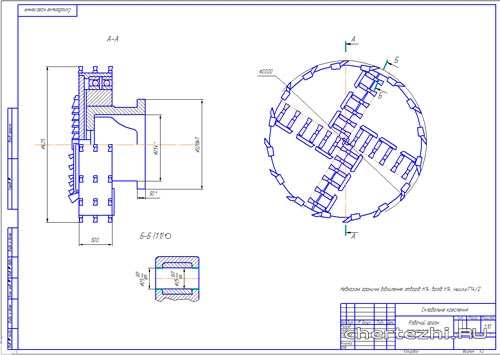
1. Обґрунтування конструкції робочого обладнання і робочого органа
Традиційна схема ґрунторуйнуючих машин характеризується тим, що енергія від двигуна – М (див. рис. 1) передається на робочий орган РО за допомогою передаточного – ПМ, напірного – НМ, ходового – ХМ, тягового – ТМ механізмів із різних сполучень.
Така схема передачі енергії від двигуна до робочого органу призводить до значних втрат енергії в трансмісіях цих механізмів і зниженню ККД машин. Необхідність підвищення робочих навантажень і продуктивності зумовлює збільшення маси машини і потужності встановлених на них двигунів, а ці показники не можуть зростати безкінечно.
Перелічених недоліків позбавлені машини, які забезпечують збільшення механічного і немеханічного впливу на середовище робочими органами з відносно невеликою масою, але з окремим спеціальним приводом чи за допомогою активного середовища – газу, води, лазерного випромінювання тощо. Машини з робочими органами ударної, вібраційної, швидкісної, газової, лазерної дії чи їх сполучень одержують усе більше поширення в зв’язку з можливістю створення великих робочих навантажень і швидкостей при значному зменшенні маси машини, а також можливістю збільшення корисної потужності двигунів без зростання розмірів машин. Такі машини і робочі органи відносяться до динамічних.
У машинах з динамічними робочими органами енергія руйнування передається на робочий орган від кількох джерел (М1, М2,...,Мn), див. рис. 1.2: двигуна (чи двигунів) робочого органа, що виконують роботу руйнування робочого середовища, і двигуна переміщення робочого органа. Розміщення джерела енергії безпосередньо на робочому органі дозволяє зменшити її витрати за рахунок виключення із системи енергії, необхідної для переміщення маси несучої конструкції (платформи, стріли, рукоятки, тощо). Динамічний орган є рухливим відносно машини чи її частини. Це дозволяє одержати на робочому органі значно більші зусилля і швидкості, ніж на традиційних машинах, знизити масу машин, підвищити ККД і продуктивність.
Найбільш розповсюджений механічний контактний спосіб руйнування ґрунту. Динамічні робочі органи можуть мати незалежний (з вільно- падаючим вантажем, вібраційний, ударний, швидкісний, вибуховий віброударний тощо) є найбільш ефективним. Енергія руйнування передається від двигуна (чи кількох двигунів) безпосередньо на робочий орган і далі на робоче середовище. Ефективність процесу в цьому випадку не залежить від тягового чи напірного зусилля.
Залежний привод динамічних робочих органів буває пружинним, гідравлічним, пневматичним чи їх сполученням. В ньому ефективність процесу залежить від сили опору робочого середовища руйнуванню. За рахунок цього опору пружній елемент накопичує енергію, яка під час сколювання елемента середовища передається на робочий орган і забезпечує додаткове зусилля руйнування. Пружній елемент встановлюється між напірним, ходовим чи тяговим механізмами і робочим органом. В цьому випадку зусилля руйнування залежить від тягового чи напірного зусилля машини.
Робочий процес машини з динамічними робочими органами відбувається шляхом окремих ударів, серії ударів, вібрації, швидкісного працювання робочого органа в масиві, а також різання з високою швидкістю.
На основі теорії динамічного руйнування робочих середовищ в КНІБА розроблені нові принципи роботи землерийної техніки, які дозволили створити перші зразки машин з великою питомою продуктивністю (18...20)м3/кВт.год і зменшеною масою.
Основні з цих принципів формуються наступним чином.
1. Формування орієнтовочних високих швидкостей навантаження. Це забезпечує збільшення продуктивності машин, зменшення їх металоємкості та зниження енергоємності руйнування ґрунту.
2. Перерозподіл енергетичного потоку. Робочий орган повинен мати свій двигун, а не одержувати енергію від головного двигуна машини через передачу (трансмісію) з низьким ККД.
3. Формування перед робочим органом ослаблених зон, які створюються за рахунок накопичення стомлюючих деформацій при багатоциклічних навантаженнях.
4. Руйнування ґрунту способом відривання для зменшення енергоємності процесу.
5. Зменшення енергоємності руйнування ґрунту за рахунок відрізання елемента забою без його повного руйнування.
6. Поєднання в одному робочому органі функцій руйнування ґрунту і його транспортування.
7. Зменшення енергоємності руйнування за рахунок обвалення ґрунту.
Начипне устаткування працює наступним чином. При одночасному переміщенні базової машини і обертанні робочого органа відбувається руйнування ґрунту внаслідок різання і втаклюючих деформацій та одночасного викидання ґрунту транспортуючими елементами. Для зміни ширини траншеї передбачена можливість повороту робочого органа в горизонтальній площині.
2.Загальні розрахунки робочого обладнання
2.1. Вихідні данні
Відповідно до завдання на індивідуальну роботу ( < 1 >, табл. 6.1, варіант 15) вихідні дані наведено в табл. 2.1.
Таблиця 2.1. Вихідні дані до індивідуального завдання
Параметр Значення
Продуктивність устаткування – П, м.п./год 520
Межа динамічної міцності на стиснення грунта - s, МПа 0,13
Відносна динамічна деформація грунта - e 0,01
Щільність грунта - r, кг/м3 1590
Динамічний модуль пружності грунта – Е, МПа 13
Коефіцієнт Пуассона грунта - m 0,28
Швидкість взаємодії різальних елементів робочого органа з грунтом – V, м/с 16
Діаметр робочого органу – D, м 2,0
Глибина траншеї – Н,м 1,6
Ширина траншеї – В,м 0,6
Ширина робочого органу - В ,м
0,4
Кут різання - d, град 45
2.2. Розрахунок параметрів
Кут повороту робочого органа - b у горизонтальній площині відносно подовжньої осьової площини базової машини (див. рис. 2.1-2.2) визначаємо за формулою: