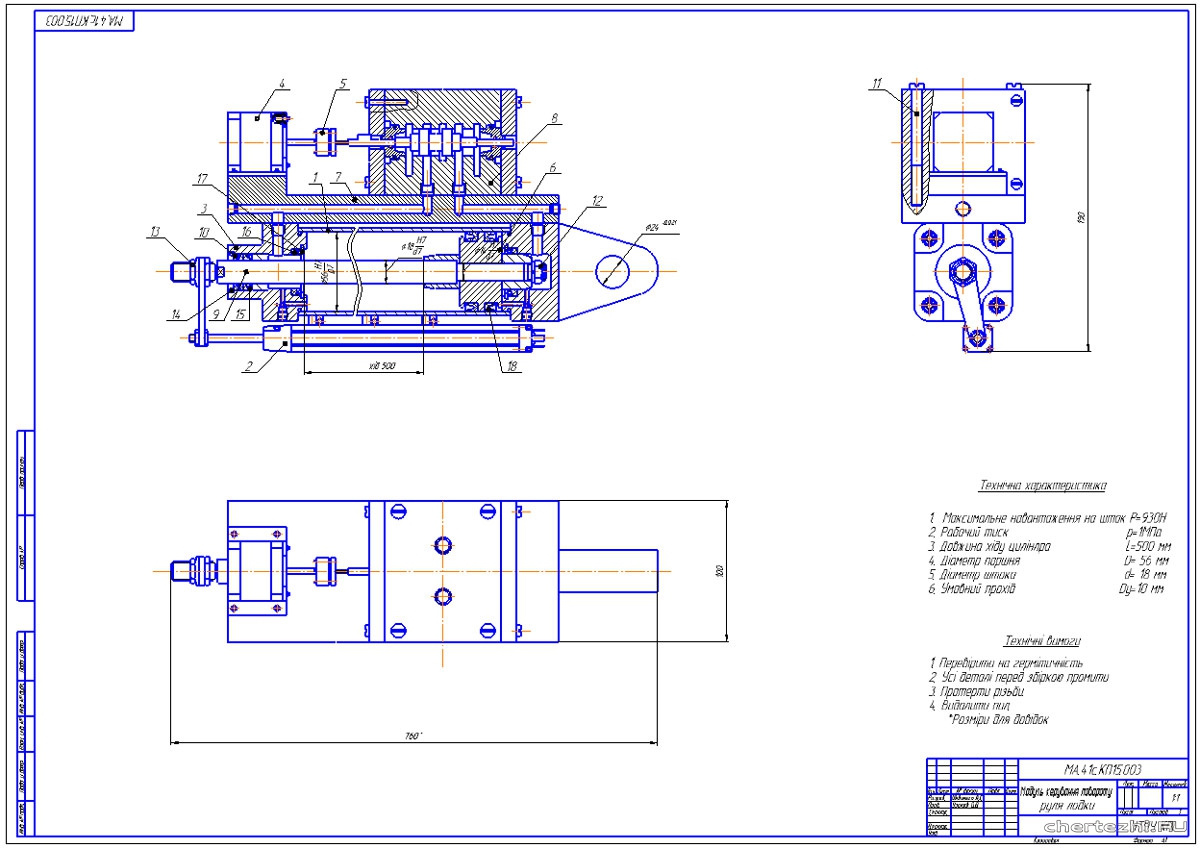
НТУУ КПІ / Кафедра прикладної гідроаеромеханіки і механотроніки / Цілю даного проекту є створення системи контролю приводу рульового керування судном з поворотним механізмом. Позиціонування ланки маніпулятора може здійснюватися за допомогою ручного, електропневматичного привода. Ефективність виконання завдання оцінюється наступними критеріями: плавність регулювання, швидкодія, висока дискретність, автономність. / Склад: 5 аркушів креслення (Приклади використання системи, Схема пневматична принципованапів конструктивна, Модуль керування повороту руля лодки, Алгоритм програми та программакерування КД) + специфікація + ПЗ. Дата: 14.6.15 11:23 | Поместил: fire_dance | Размер: 1.36 MB | Скачали: 0Платформа: Компас | Рб: 1 |