Коротко о файле:СибГУ / Задача кинематического анализа механизмов заключается в определении таких кинематических параметров, как положение звеньев механизма в различные моменты времени, траектории движения отдельных точек механизма, а также угловые скорости и ускорения звеньев механизма. / Состав: 4 листа чертежи + ПЗ (29 страниц)
Содержание
1. Структурный анализ механизма 3
2. Кинематический анализ механизма 4
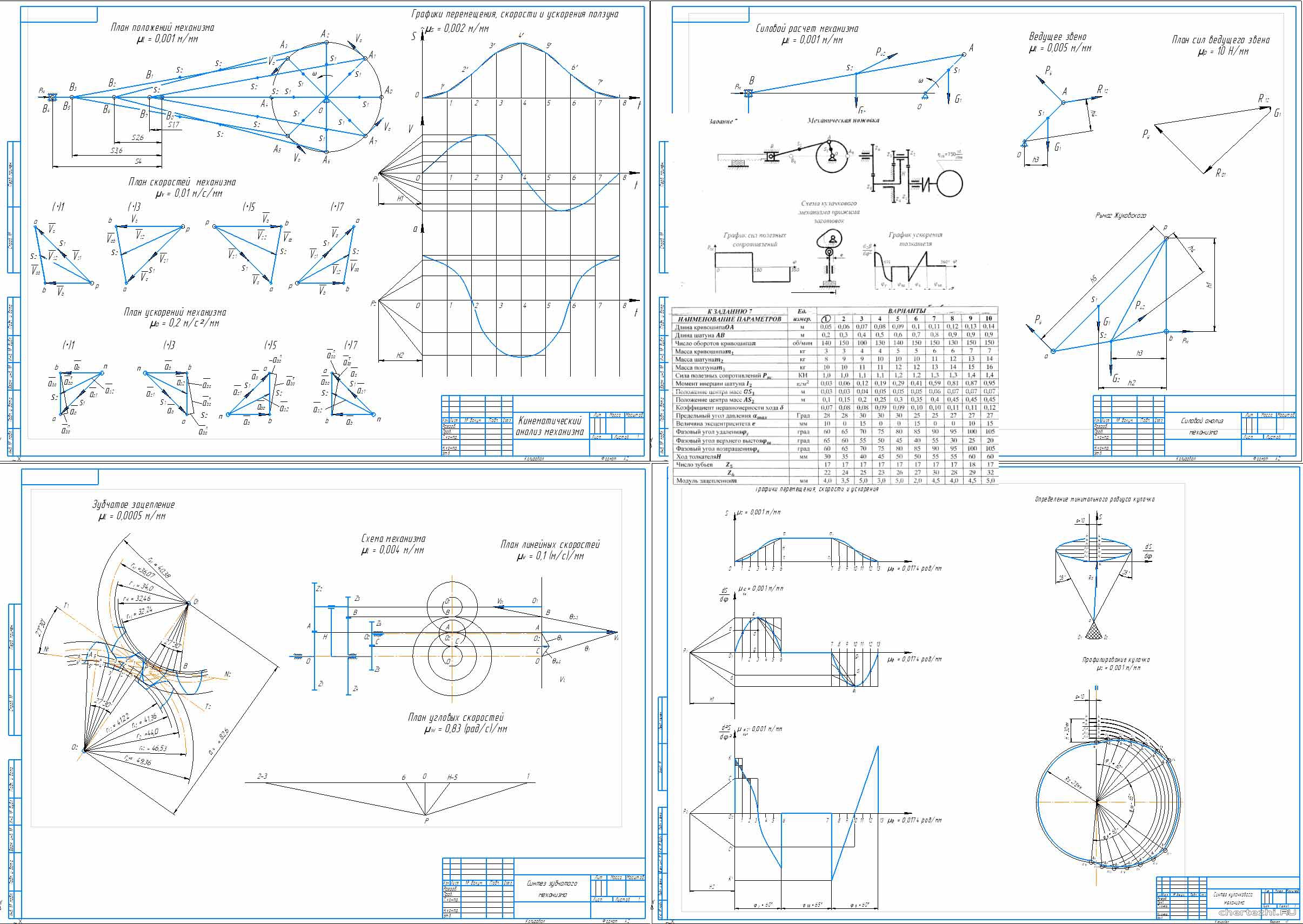
2.1 Построение 8 планов положений механизма 4
2.2 Построение планов скоростей механизма 5
2.3 Построение планов ускорений механизма 7
2.4 Кинематические диаграммы движения точки В 8
3. Силовой анализ механизма 10
3.1 Определение сил тяжести и сил инерции звеньев. 10
3.2 Силовой расчет группы Ассура 3 – 2 11
3.3 Силовой расчет ведущего звена. 12
3.4 Рычаг Жуковского. 13
4. Синтез зубчатого механизма. 14
4.1 Расчет планетарной передачи 14
4.2 Расчет основных геометрических параметров зубчатой передачи 16
4.3 Определение линейных и угловых скоростей зубчатых колес 22
4.4 Вычерчивание зубчатого зацепления. 23
5. Синтез кулачкового механизма 25
5.1 Построение графиков движения толкателя 25
5.2 Определение минимального радиуса кулачка 28
5.3 Профилирование кулачка. 28
Список использованных источников 30
Плоский кривошипно – ползунный механизм состоит из 3 – х подвижных звеньев и одного неподвижного звена (стойки). Механизм имеет вращательные и поступательные кинематические пары 5 – го класса, где p5 = 4.
Степень подвижности механизма определяем по формуле Чебышева:
W=3∙n-2∙p_5-p_4,
где 3 – количество свободных движений отдельно взятого звена на плоскости;
n – число подвижных звеньев;
2 – число условий связи (ограничений), накладываемых парами пятого класса;
р5 – число пар пятого класса;
р4 – число пар четвертого класса.
W=3∙3-2∙4=1
Задача кинематического анализа механизмов заключается в определении таких кинематических параметров, как положение звеньев механизма в различные моменты времени, траектории движения отдельных точек механизма, а также угловые скорости и ускорения звеньев механизма.