Выпускная квалификационная работа - Расчёт, проектирование и программирование захвата промышленного манипулятора, проводящего сортировочные работы на автоматизированной конвейерной линии
Коротко о файле:МГОК / Специальность 15.02.10 Мехатроника и мобильная робототехника / В дипломной работе я спроектирован захват промышленного манипулятора для автоматизированной производственной линии, который будет использоваться компанией «Р-Фарм» для более продуктивного использования пространства и персонала. / Состав: 3Д модель сборка, детали + ПЗ 83стр.
СОДЕРЖАНИЕ:
ВВЕДЕНИЕ 9
РАЗДЕЛ 1. НАИБОЛЕЕ ВАЖНАЯ ИНФОРМАЦИЯ О ОАО «Р-ФАРМ» И ЗАХВАТАХ ПОМЫШЛЕННЫХ МАНИПУЛЯТОРОВ
1.1. ЗАО «Р-Фарм». Основные цели и задачи компании 11
1.2. Основные понятия в области захватных устройств 15
1.3. Основные параметры захватных устройств 18
1.3.1. Грузоподъемность 18
1.3.2. Размер захватываемой поверхности 19
ГЛАВА 2. РАСЧЁТ И ПРОЕКТИРОВАНИЕ ЗАХВАТНОГО УСТРОЙСТВА
2.1. Подбор шарико-винтовой передачи 21
2.2. Подбор редуктора 23
2.3. Подбор двигателя 23
2.4. Определение и расчёт основных узлов захватного устройства 26
2.4.1. Расчёт шпоночного соединения 26
2.4.2. Расчет винтового соединения несущей стойки и стяжек 27
2.4.3. Расчет винтового соединения основания и рычагов 29
2.4.4. Технические характеристики шарико-винтовой передачи SBC STK1605-3-R 31
2.4.5. Условия проведения приёмочного теста для шарико-винтовой передачи 32
2.4.6. Технические характеристики двигателя MAXON EC13 (6 Watt) исполнение 305190 34
2.4.7. Технические характеристики редуктора MAXON GP 13A исполнение 110316 35
2.4.8. Технические характеристики радиально-упорного подшипника SKF 3200 A-2RS1TN9/MT33 36
2.4.9. Кинематическая схема механического ЗУ с клиновым ПМ 37
2.4.10. Выбор типа ПР по грузоподъемности 37
ГЛАВА 3. ОПРЕДЕЛЕНИЕ УСИЛИЯ ЗАЖИМА ЗАХВАТНОГО УСТРОЙСТВА
3.1. При вертикальном линейном перемещении 41
3.2. При горизонтальном линейном перемещении 41
3.3. При вращении ЗУ в горизонтальной плоскости 41
3.4. При торможении всех трех движений 42
3.5. Эмпирическое усилие зажима ЗУ 42
3.6. Определение тягового усилия пневмоцилиндра Р2 44
3.7. Определение силового передаточного отношения механизма Kр 45
3.8. Схема построения профиля центрующих губок 46
3.9. Расчет сил, действующих в местах контакта 49
3.10. Расчёт губок на прочность 49
3.11. Расчет напряжений на поверхности контакта 51
3.12. Расчет губок на изгиб 52
3.13. Расчет на срез и выбор штифтов 53
3.14. Оценка прочности болтовых креплений между ЗУ и рукой ПР 55
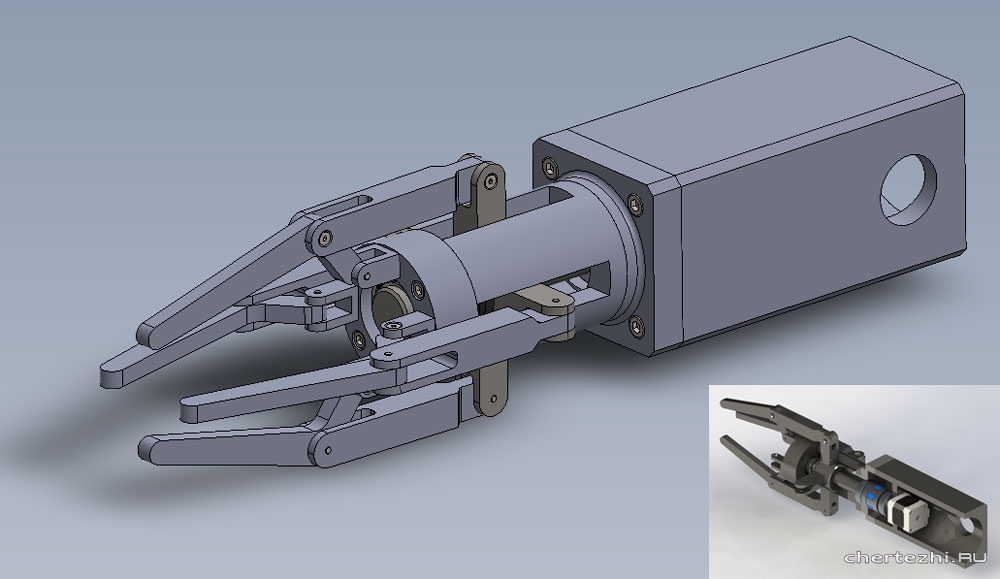
3.15. Проектирование и 3D моделирование захвата манипулятора мобильного робота в среде SolidWorks 57
3.16. Программирование манипулятора, оснащённого захватом на языке С++ 60
РАЗДЕЛ 4. Сменные схваты и устройства автоматической замены схватов и системы обеспечения техники безопасности
4. 1. Сменные схваты и устройства автоматической замены схватов 63
4.2. Системы обеспечения техники безопасности 71
4.3. Экономическое обоснование проекта 80
ЗАКЛЮЧЕНИЕ 82
Список использованной литературы 83
ЗАКЛЮЧЕНИЕ:
В процессе выполнения данной дипломной работы был спроектирован и изучен схват промышленного манипулятора, так же удалось верно представить его в среде ПО 3D-моделирования SolidWorks, что сыграло большую роль в визуализации разработки.
Данная разработка существенно удешевит процесс автоматизации производств компании «Р-Фарм», наибольшего внимания стоит, конечно же, система смены схватов манипулятора, что, конечно, повлечет за собой и трудности программирования новой конфигурации захватного устройства.
Но, с грамотными кадрами, который у данной компании в достатке, такие проблемы будет весьма легко преодолеть. В замен же, данное ОАО приобретёт готовую к неожиданной трансформации и переоборудованию автоматизированную линию, что, в последующем, может помочь при смены рода деятельности компании.