СГТУ / Кафедра «Автоматизация и управление технологическими процессами» / Дисциплина «Схемотехника систем управления» / Задание: Разработать структурную схему управления РТК, примерная схема которого приведена на рисунке, и структурную и принципиальную схемы управления роботом-манипулятором. Спроектировать печатную плату. РТК включает два манипулятора, СТЗ в режиме визуальной инспекции, поворотный стол и пресс. / 3 листа чертежи + ПЗ.
МГСУ / Институт Экономики и Управления в Строительстве / Кафедра автоматизации инженерно-строительных технологий / По дисциплине: «Автоматизация технологических процессов и производств» / Объект управления: Технологический процесс сушки шликера в распылительной сушилке. / Состав: чертежи (функциональные и структурные схемы, график температуры) + ПЗ.
Проектирование роботизированного технологического комплекса для механической обработки детали. 3 листа чертежи: Планировка РТК / Циклограмма / Захватное устройство + ПЗ / ТулГУ / Кафедра «Автоматизированные станочные системы»
ИГХТУ / В курсовой работе по автоматизации участка охлаждение, очистки углекислоты была рассмотрена технология данного процесса, обоснован выбор контроллера (а именно контроллер FX3G компании Mitsubishi Electric), датчиков, регулирующих органов и исполнительных устройств. Объектом является туннельная, конвейерная печь непрерывного действия с газовым обогревом. В туннельной печи внутри пекарной камеры расположен непрерывно движущийся конвейер с формами (тележками) для выпечки вафельных листов. Туннельная печь предназначена для выпечки любых видов плоских вафель и низких вафель-трубочек. Вафельная печь находится на кондитерской фабрике. / 4 листа чертежи + ПЗ.
ТулГУ. Работа по дисциплине «Приводы роботов ». Разработка пневматической схемы и составление описания работы модуля подвижности промышленного робота. Состав пневматической схемы: Пневмодвигатель поступательного действия. Тип включения двигателя — запитка штоковой полости постоянным давлением и переключение давления в поршневой полости с магистрали на атмосферу. Тип пневмораспределителя — 4/2. Позиционирование — по двум регулируемым упорам. Тип демпфера — односторонний. Подключение демпферов - к магистрали через регулятор давления. 6 листов чертежи (редуктор, деталировка, привод, приводной вал, пневматическая схема, пневмоцилиндр) + ПЗ + спецификации.
СГТУ / Кафедра «Автоматизация и управление технологическими процессами» / По курсу: «Схемотехника систем управления» / Целью данного курсового проекта является разработка схемы системы управления адаптивным промышленным роботом и разработка печатной платы устройства, в соответствии с требованиями, предъявляемыми к печатным платам. / Состав: 3 листа чертежи + спецификация + ПЗ.
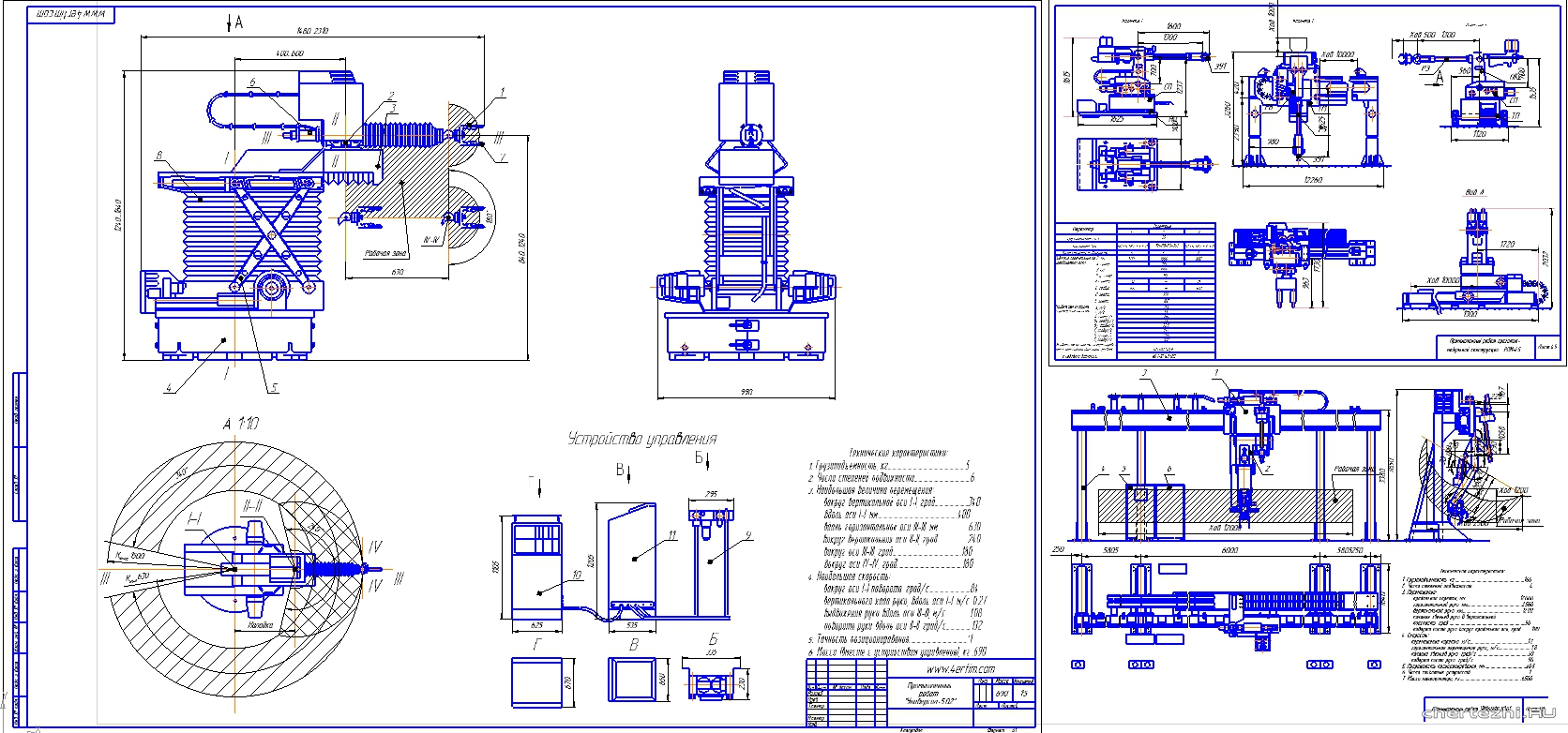
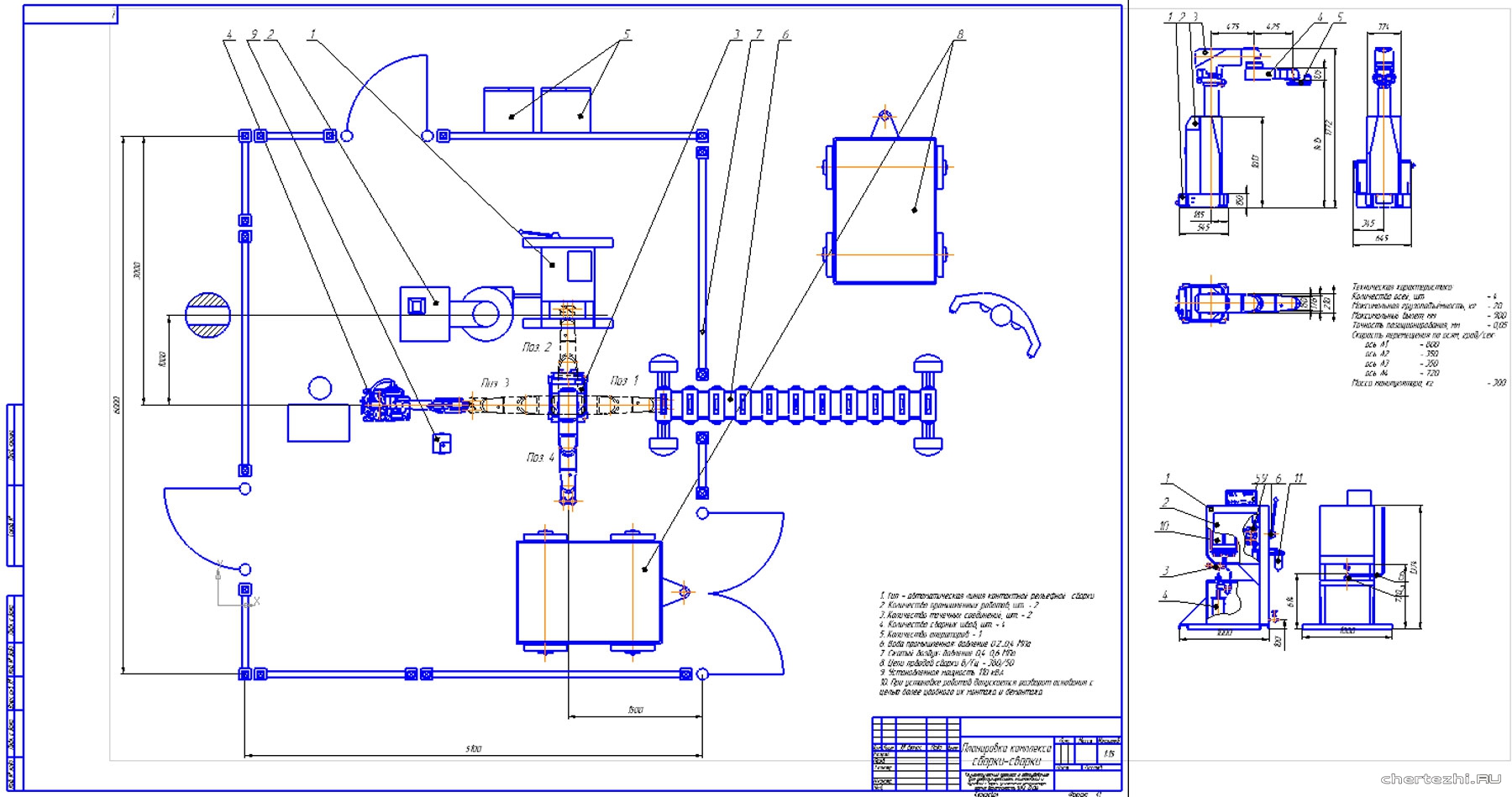
Произведена замена ручного труда сварщика при приварке крепёжных деталей на труд роботов, разработана специализированная сварочная машина и роботизированный комплекс. 7 листов чертежи (Планировка комплекса сборки-сварки / Манипулятор АМ 120 iB (FANUC) / Манипулятор А 520i (FANUC) / Машина сварочная / Технология сборки-сварки / Циклограмма / Экономика) + ПЗ.
Курсовая работа «Роботизация» предназначена для закрепления и структурирования знаний, полученных студентами при изучении технологии машиностроения и механики. Роботизация курсовой разрабатывается на основании технического задания к проектированию и исходных данных. Курсовая по роботизации состоит из следующих разделов:
- исходные данные;
- раздел роботизации;
- графическая часть;
- заключение.
При разработке «автоматизации учета» курсовая работа следует описать основные преимущества АСУ: сокращение численности трудовых ресурсов, увеличение объемов производства, увеличение эффективности, повышении экономичности, увеличение срока эксплуатации оборудования и т.д.
В общей части предоставляются исходные данные, описание техпроцесса, требования к автоматизированной системе, обоснование выбора объекта автоматизации.
Курсовая на тему автоматизация предусматривает разработку чертежей: схема техпроцесса, схема автоматизированной системы управления структурной схемы автоматизации, принципиальная схема подключения приборов автоматизации.
В разделе «автоматизация» составляется описание к принципиальным и функциональным схемам автоматизации, осуществляется подбор контрольно-измерительных приборов (КИП), разрабатывается алгоритм функционирования АС, программа работы схемы, рассчитывается конфигурация устройства управления, составляется спецификация оборудования, а также обоснование выбора контроллера и модулей.
Высочайшим направлением автоматизации является роботизация. Применение в технологическом процессе робототехники обеспечивает максимальную точность действий при выполнении конкретных операций. Робототехника курсовая предусматривает выполнение вышеуказанной документации, а также дополняется кинематической схемой манипулятора, описанием движений механизма, содержит чертеж-визуализацию конструкции манипулятора, сборочные чертежи, принципиальные электросхемы устройства управления.
В заключительной части рассчитывается срок окупаемости автоматизации/роботизации, составляется вывод курсового проекта. «Роботизация процесса» курсовые и дипломные проекты можно условно бесплатно скачать на нашем сайте chertezhi.ru.