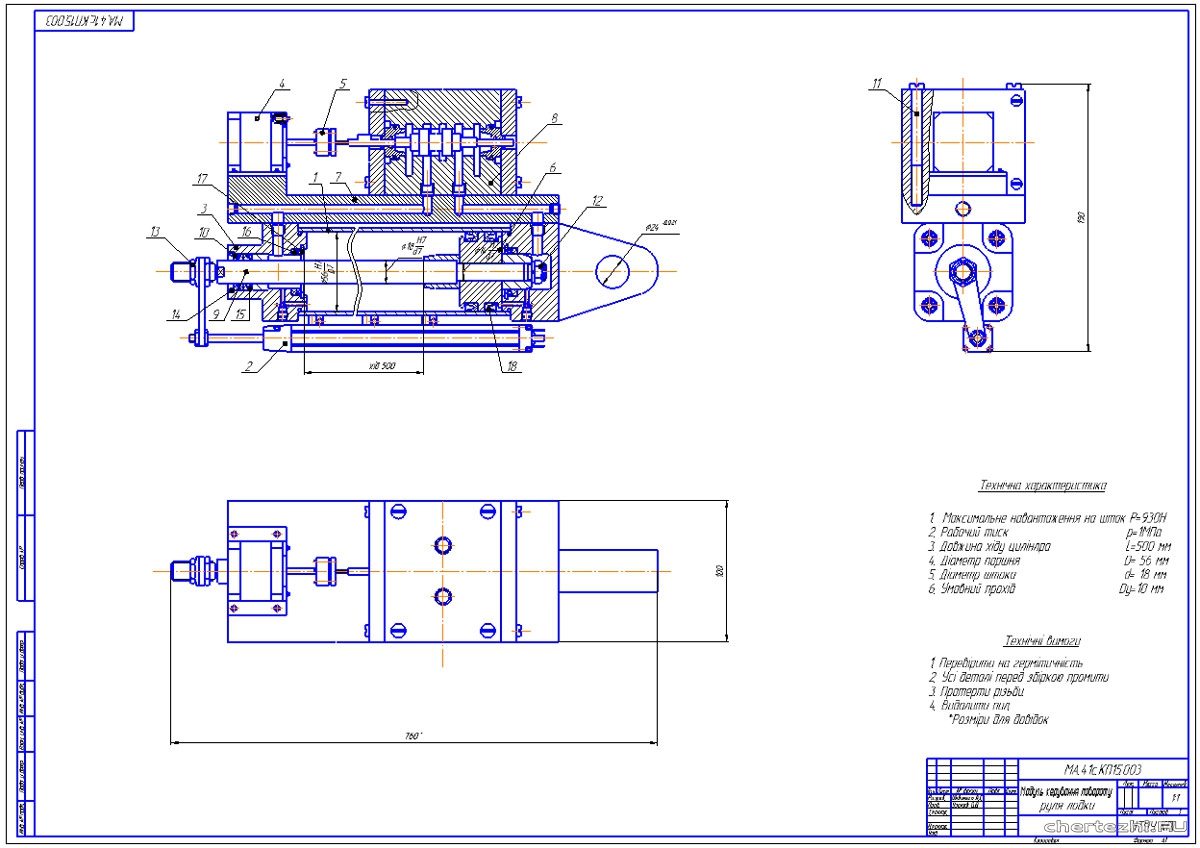
Коротко о файле:НТУУ КПІ / Кафедра прикладної гідроаеромеханіки і механотроніки / Цілю даного проекту є створення системи контролю приводу рульового керування судном з поворотним механізмом. Позиціонування ланки маніпулятора може здійснюватися за допомогою ручного, електропневматичного привода. Ефективність виконання завдання оцінюється наступними критеріями: плавність регулювання, швидкодія, висока дискретність, автономність. / Склад: 5 аркушів креслення (Приклади використання системи, Схема пневматична принципованапів конструктивна, Модуль керування повороту руля лодки, Алгоритм програми та программакерування КД) + специфікація + ПЗ.
Зміст
Завдання курсового проекту
Вступ
1. Ціль та задачі проекту
1.1. Пневматичний привід позиціонування
2. Огляд існуючих варіантів
2.1. Обгрунтування схеми рульового приводу лодки
3.Електромеханічна частина системи керуючого приводу
3.1Електромеханічна схема кутом нахилу ланки маніпулятора
3.2 Вибір крокового двигуна
4.Теоретичні відомості про режими роботи крокового двигуна
5. Статичний розрахунок основного приводу
6. Динамічний розрахунок приводу
6.1. Знаходження пропускної здатності пневмоліній
6.1.1. Знаходження пропускної здатності напірної пневмоліні
6.1.2. Знаходження пропускної здатності пневмолінії вихлопу
6.2. Врахування об’ємів трубопроводів при динамічному розрахунку
6.2.1. Врахування об’ємів трубопроводів при динамічному розрахунку напірної пневмолінії
6.3. Визначення часу підготовчого періоду
6.4. Визначення часу руху
6.5. Визначення часу заключного періоду
6.6. Визначення часу прямого ходу
7. Висновок
Початкові умови:
Джерело сигналу Компютер
Тип циліндру 1 шт ТИМ ЕМП КД
Напруга електричного джерела живлення 12 (В)
Тип та тиск енергії живлення Пнвм 1.0 (Мпа)
Зусилля на штоці 1200 (Н)
Швидкість на виході 0.7 (м/с)
Час перехідного процесу 0.8 (с)
Висновок
Під час роботи було розроблено механотронну систему керування кутом повороту руля лодки. Позиціонування руля може здійснюватися за допомогою пневматичних приводів. Була розроблена пневматична схема приводу, був розрахований та підібраний пневматичний циліндр. Була вибрана пневматична аппаратура . Для контролю положення штоку циліндра був підібраний лінійний датчик переміщення.
Був розроблений та накреслений модуль повороту. Ефективність виконання завдання приводами оцінюється наступними критеріями: Плавність регулювання ,швидкодія, точність, автономність.